

curl https://sh.rustup.rs -sSf | shTask- und Datenparallelität mit Rust
| Stefan Lankes | Jens Breitbart |
|---|---|
|
|
System Software @ RWTH | Here for fun and no profit |
Hinweise zum Vortrag
Einstieg: https://www.rust-lang.org
Playground: https://play.rust-lang.org
Tutorial: https://rustbyexample.com
Was ist Rust?
Rust ist eine (relativ) neue Programmiersprache für systemnahe Software
fn main() {
// Die Statements werden ausgeführt sobald
// das compilierte Binary gestartet wird.
// Ausgabe auf stdout
println!("Hello para//el 2019!");
}Bekannt u.a. für den Einsatz in Firefox
⇒ Rust Code läuft somit auf Millionen von Rechnern
Woher kommt Rust?
Rust ist ein open-source (MIT + Apache) Projekt
Wird aktuell primär von Mozilla Research gesponsort
Die Weiterentwicklung selbst wird allerdings stark durch die Community getrieben
Vorteile von Rust
C/C++ ähnliche Performance
Compilerbasierte Überprüfungen welche z.B.
Speichersicherheit (ohne Garbage Collection) garantieren
Data Races verhindern
⇒ Falscher Code compiliert nicht
Inhaltsübersicht
Rayon
SIMD
Tokio.rs
Keine Einfühung zu Threads in Rust, siehe dafür z.B. Heise Developer
Rayon: Parallelism in Rust
Unterstützt parallele Berechungen auf Basis von Task-Parallelität, Fork-Join-Prinzipien und Work Stealing
Ähnlich zu Cilk (daher auch der Name)
Bietet aber auch Daten-Parallelität über Iteratoren an
Zielsetzung von Rayon (I)
Zitat: Rayon is a data-parallelism library for Rust. It is extremely lightweight and makes it easy to convert a sequential computation into a parallel one. It also guarantees data-race freedom.
Compiler erkennt mehrfach Benutzung
Es kann nur einen (Owner) geben
Zudem müssen Datentypen als Threadsafe definiert werden
Zielsetzung von Rayon (II)
Einführung spezieller Traits, um Threadsicherheit zu gewährleisten.
// A type is `Send` if it is safe to send it to another thread.
// A type is `Sync` if it is safe to share between threads.
fn foo<T:Send+Sync>(value: T) {
...
}Beispiel: N-Body
Interative Berechnung der Gravitations- bzw. Coulomb-Kraft zwischen Partikeln im Raum.
Kraft: \(\vec{F}(n+1)=\vec{r}(n) \cdot |\vec{r}(n)|^{-3/2}\)
Geschwindigkeit: \(\vec{v}(n+1)=\Delta t \cdot \vec{F}(n+1) + \vec{v}(n)\)
Position: \(\vec{x}(n+1)=\Delta t \cdot \vec{v}(n+1) + \vec{x}(n)\)
Nur zum Erläutern der Prinzipien
Besser optimierte Lösungen verfügbar
N-Body
N-Body: Naive Lösung
Ein Körper wird beschrieben durch seine Postion sowie seine Geschwindigkeit
Position und Geschwindigkeit sind Vektoren im 3-dimensionalen Raum
#[derive(Copy, Clone, Debug)]
pub struct Vector<T> {
pub x: T,
pub y: T,
pub z: T
}N-Body: Vektor-Operationen
Für diese Vektoren müssen die Vektor-Operation definiert werden
Hier selber geschrieben
Standard-Implementierungen (z.B. cgmath) sind verfügbar
/// Definition des Operators +=
impl<T: Add<Output=T> + AddAssign> AddAssign for Vector<T> {
fn add_assign(&mut self, other: Vector<T>) {
self.x += other.x;
self.y += other.y;
self.z += other.z;
}
}N-Body: Vektor-Operationen
Die Körper werden durch ein zusammenhängender, erweiterbarer Feld-Typ,
Vec<T>beschrieben.Teil der Standard-Laufzeitumgebung
#[derive(Clone, Debug, PartialEq)]
pub struct NBody {
pub position: Vec<Vector<Precision>>,
pub velocity: Vec<Vector<Precision>>
}N-Body: Algorithmus
Abstand zwischen allen Körper bestimmen
Kraft herleiten, Geschwindigkeit und Position neu bestimmen
position.iter().zip(velocity.iter_mut())
.for_each(|(item_pi, item_vi)| {
let mut f: Vector<Precision> = Vector::new(0.0, 0.0, 0.0);
position.iter().for_each(|item_pj| {
// Newton’s law of universal gravity calculation.
let diff = *item_pj - *item_pi;
let n2 = diff * diff;
let power = 1.0 / (n2.sqrt() * n2);
f += diff*power;
});
*item_vi += f*DELTA_T;
});N-Body: Trick
2 Iteratoren über die Geschwindigkeit und Position im Gleichschritt bewegen ⇒
zip-Operator in Rust
position.iter().zip(velocity.iter_mut())
.for_each(|(item_pi, item_vi)| {
let mut f: Vector<Precision> = Vector::new(0.0, 0.0, 0.0);
position.iter().for_each(|item_pj| {
// Newton’s law of universal gravity calculation.
let diff = *item_pj - *item_pi;
let n2 = diff * diff;
let power = 1.0 / (n2.sqrt() * n2);
f += diff*power;
});
*item_vi += f*DELTA_T;
});Parallelisierung mit Rayon
Definition von parallelen Itertoren (ähnlich zu TBB)
Stehen für alle Algorithem aus der Standardumgebung zur Verfügung
position.par_iter().zip(velocity.par_iter_mut())
.for_each(|(item_pi, item_vi)| {
let mut f: Vector<Precision> = Vector::new(0.0, 0.0, 0.0);
position.iter().for_each(|item_pj| {
// Newton’s law of universal gravity calculation.
let diff = *item_pj - *item_pi;
let n2 = diff.square();
let power = 1.0 / (n2.sqrt() * n2);
f += diff*power;
});
*item_vi += f*DELTA_T;
});Array of Structures
Bisherige Lösung ist anschaulich, aber nicht für SIMD geeignet
Einzelne Komponenten (z.B. alle
x-Einträge) liege nicht kontinuierlich im SpeicherAlignment nicht zwingend garantiert
Idee: Structure of Arrays
#[derive(Clone, Debug, PartialEq)]
pub struct NBody {
pub position: Vec<Vector<Precision>>,
pub velocity: Vec<Vector<Precision>>
}Structure of Arrays
Statt je Körper eine Struktur in einem Array abzulegen, wird eine Struktur von Arrays angelegt
Mögliche Optimierung von Vektor-Operationen
Typische Lösung in C
typedef float Scalar;
typedef struct {
Scalar x[nParticles];
Scalar y[nParticles];
Scalar z[nParticles];
Scalar vx[nParticles];
Scalar vy[nParticles];
Scalar vz[nParticles];
} NBody;SIMD-Programmierung
Mögliche Lösungen (allgemein)
Optimierungen durch den Compiler (häufig nicht optimal)
Hinweise an den Compiler (z.B. OpenMP)
Direkte Programmierung durch Intrinsics
// Entspricht direkter Assembler-Progrommierung
__m256 _mm256_add_ps (__m256 a, __m256 b);packed_simd
Portable SIMD-Vektoren durch
packed-simdZurzeit nur mit dem
nightly-Compiler verwendbarEinführung neuer Typen, welche SIMD-Register entsprechen
Standard-Operatoren existieren bereits für diese Typen
// Vektor-Addition mit 8 einfach, genaue Fließkommazahlen
pub fn sum(a: f32x8, b: f32x8) -> f32x8 {
a+b
}Structure of Arrays in Rust
Tist hier ein SIMD-Datentyp (z.B.f32x8)Es fehlt ein Iterator, um parallel über
x,yundzzu wandern
pub struct Array<T>([T; N_PARTICLES_SOA]);
pub struct StructOfArrays<T> {
pub x: Array<T>,
pub y: Array<T>,
pub z: Array<T>
}
pub struct NBodySoA {
position: StructOfArrays<PrecisionSoA>,
velocity: StructOfArrays<PrecisionSoA>
}Neuer Iterator
Aktuelle Position (
pos) festhalten und auswerten
pub struct StructOfArraysIter<'a, T: 'a> {
inner: &'a StructOfArrays<T>,
pos: usize, len: usize
}
impl<'a, T> Iterator for StructOfArraysIter<'a, T> {
type Item = (&'a T, &'a T, &'a T);
fn next(&mut self) -> Option<Self::Item> {
if self.pos < self.len {
let result = (&self.inner.x.0[self.pos],
&self.inner.y.0[self.pos],
&self.inner.z.0[self.pos]);
self.pos += 1;
Some(result)
} } }Anpassung des Algorithmuses
Iteratoren liefern nun
(x, y, z)zurück.
position.iter().zip(velocity.iter_mut())
.for_each(|((pix, piy, piz), (vix, viy, viz))| {
let mut fx: PrecisionSoA = ...
position.iter().for_each(|(pjx, pjy, pjz)| {
let mut dx: ...
for lane in 0..PrecisionSoA::lanes() {
dx += *pjx - PrecisionSoA::splat(pix.extract(lane));
dy += ..
}
let n2 = dx*dx + dy*dy + dz*dz;
let power = 1.0 / (n2.sqrt() * n2);
fx += dx*power; fy += dy*power; fz += dz*power;
});
*vix += fx * dt; *viy += fy * dt; *viz += fz * dt;
});Paralleler Algorithmus
Parallele Iteratoren existiert nicht für eigene Iteratoren
Lösung:
Selber definieren
Oder aus sequentielle Iteratoren ableiten
Eventuell sind diese nicht optimal
position.iter().zip(velocity.iter_mut()).par_bridge()
.for_each(|((pix, piy, piz), (vix, viy, viz))| {
..
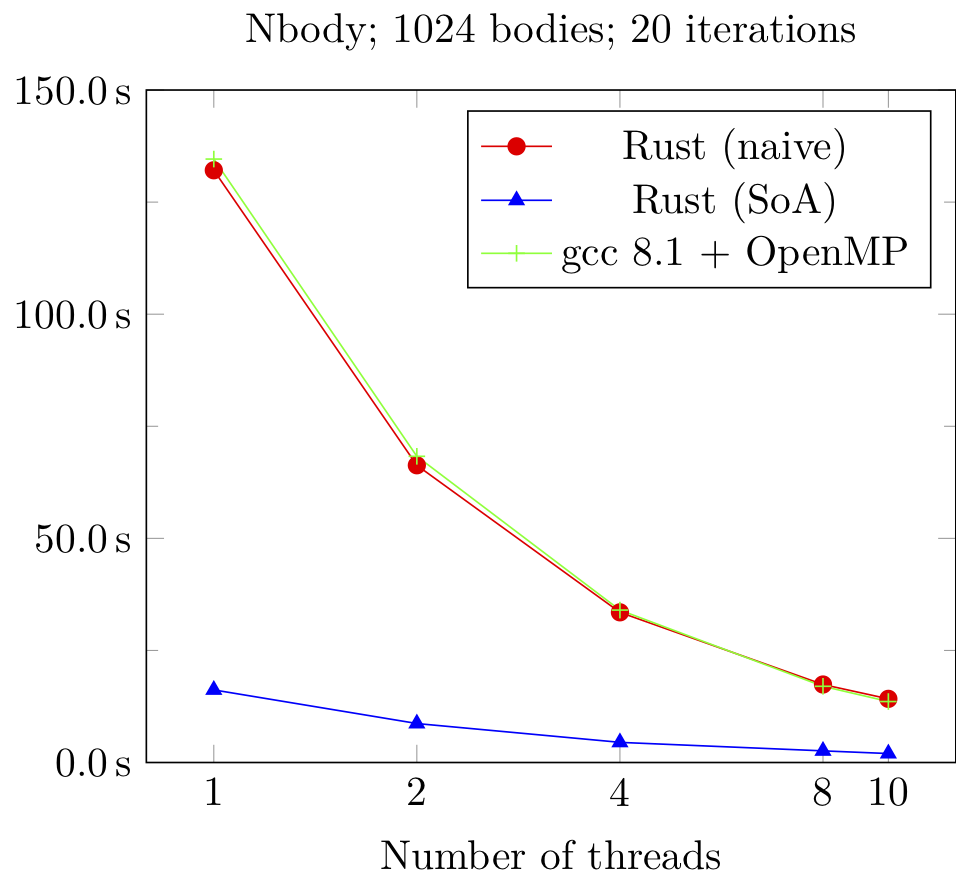
}Performance / Traue keiner Statistik
tokio.rs
Eine Bibliothek für Nebenläufigkeit
basierend auf
Futuresund einer Laufzeitumgebung
Anwendungsgebiet: asynchrones I/O
Laufzeitumgebung
Multithreaded + work stealing
Multiplexing
Futures sind
poll-basiertBackpressure im allgemeinen kein Problem
Unnötige Futures werden automatisch verworfen und erzeugen keine Last
Beispiel: Client / Server
Einfacher TCP Client und Server
Client sendet viele Anfragen parallel
Server sendet empfangene Daten wieder zurück
Idee
Eine Task pro Anfrage
Wechsel der Task, wenn sie nichts tun kann
Server (i)
Unendlicher Stream an Verbindungen
let listener = TcpListener::bind(&addr).unwrap();
let server = listener
.incoming()
.for_each(|socket| {
// für jede Verbindung
// siehe nächste Folie
})
.map_err(|err| {
// Fehlerbehandlung
println!("accept error = {:?}", err);
});
tokio::run(server);Server (ii) - pro Verbindung
Wird ausgeführt sobald eine Verbindung aufgebaut wurde
let (reader, writer) = socket.split();
let amountF = io::copy(reader, writer);
let msg = amountF.then(|result| {
match result {
Ok((amount, _, _)) => println!("wrote {} bytes", amount),
Err(e) => println!("error: {}", e),
}
Ok(())
});
tokio::spawn(msg);
Ok(())Client (i) - Server Verbindung
Future für das Versenden von "hello para//el"
TcpStream::connect(&addr)
.and_then(|stream| {
println!("connected");
io::write_all(stream, "hello para//el\n").then(|result| {
println!("wrote to connection; success={:?}",
result.is_ok());
Ok(())
})
})
.map_err(|err| {
println!("connection error = {:?}", err);
})Client (ii) - Fehlerbehandlung
Retry mit exponential backoff
let number_of_connections = 100_000;
let retry_strategy = ExponentialBackoff::from_millis(10)
.map(jitter).take(3);
let client = stream::iter_ok(0..number_of_connections)
.for_each(move |_| Retry::spawn(
retry_strategy.clone(),
action
).then(|_| Ok(())));Performance
Es passiert nicht viel in dem Beispiel
Die meiste Zeit wird im OS verbracht (oder gewartet)
Linux Desktop (Ryzen 2700X): ~33.000 Verbindungen pro Sekunde
<25% last auf allen 16 Kernen
Ausblick Nebenläufigkeit
RFC #2394 async / await als Teil der Sprache
fn main() {
let closure = async || {
println("Hello from async closure.");
};
println!("Hello from main");
let future = closure();
println!("Hello from main again");
futures::block_on(future);
}Zusammenfassung
Rust ist für einen old school Entwickler gewönnungsbedürftig
Rayon und Tokio vereinfachen viele Aufgaben
packed-simdemöglicht eine transparente Verwendung von VektorregisterPerformance ist im allgemeinen sehr gut